Parameter Learning for simple ODE
In this tutorial we will learn how to learn a parameter of an ODE using gradient descent in Physika. We will use a simple exponential decay equation as our example.
The Equation
We want to learn the following ODE:
Helper functions
def zero_1d_array(len: ℝ): ℝ[m]:
results: ℝ[len] = for i: ℕ(len) -> i*0
return results
def get_1d_array_length(x: ℝ[m]): ℝ:
total: ℝ = 0
temp: ℝ = 0
for i:
temp = x[i]
total += 1
return total
def append(x: ℝ[m], var: ℝ): ℝ[n]:
new_length: ℝ = get_1d_array_length(x) + 1
results: ℝ[new_length] = zero_1d_array(new_length)
for i:ℕ(new_length):
if i<get_1d_array_length(x):
results[i] = x[i]
else:
results[i] = var
return results
Step 1: Define the ODE
First we define the right hand side of the ODE as a function:
def f(y: ℝ, θ: ℝ): ℝ:
return -θ * y
f takes the current state y and parameter theta and returns
the derivative \(\frac{dy}{dt}\).
Step 2: Build the Solver
Next we build a forward Euler solver that integrates the ODE over time:
timesteps: ℕ = 10
dt: ℝ = 0.1
def solver(θ: ℝ): ℝ[m]:
y: ℝ = 1.0
y_array: ℝ[1] = [1.0]
for i:ℕ(timesteps):
dy = f(y, θ)
y += dt * dy
y_array = append(y_array, y)
return y_array
The solver starts from initial condition \(y_0 = 1.0\) and steps forward using:
Step 3: Generate Ground Truth Data
We pick a true value of \(\theta = 2.0\) and generate the ground truth trajectory:
true_theta: ℝ = 2.0
y_true: ℝ[m] = solver(true_theta)
This is the data we will try to recover by learning \(\theta\).
Step 4: Define the Loss
We use mean squared error (MSE) between predicted and true trajectories:
def calculate_loss(θ: ℝ): ℝ:
y_predicted: ℝ[n] = solver(θ)
L: ℝ = 0.0
m: ℝ = get_1d_array_length(y_predicted)
for i:ℕ(m):
L += (y_predicted[i] - y_true[i]) ** 2
return L/m
The loss measures how far our predicted trajectory is from the true one.
As \(\theta\) approaches 2.0, the loss approaches 0.
Step 5: Train with Gradient Descent
We start with an initial guess of \(\theta = 1.0\) and update it using gradient descent:
θ: ℝ = 1.0
learning_rate: ℝ = 0.1
epochs: ℝ = 1000
for i:ℕ(epochs):
g = grad(calculate_loss, θ)
θ = θ - learning_rate * g
grad(calculate_loss, theta) computes \(\frac{dL}{d\theta}\)
automatically — Physika differentiates through the entire solver.
Step 6: Visualize Results
Finally we compare the predicted trajectory against ground truth:
y_predicted: ℝ[m] = solver(θ)
plot_trajectories(y_true, y_predicted)
After training, theta should be close to 2.0 and the trajectories
should overlap.
Note
plot_trajectories is not a built-in Physika function. To use it,
add the following helper function to physika/runtime.py:
def plot_trajectories(y_true, y_predicted):
import matplotlib.pyplot as plt
plt.plot(y_true.detach().numpy(), label="true trajectory")
plt.plot(y_predicted.detach().numpy(), "--", label="predicted trajectory")
plt.legend()
plt.show()
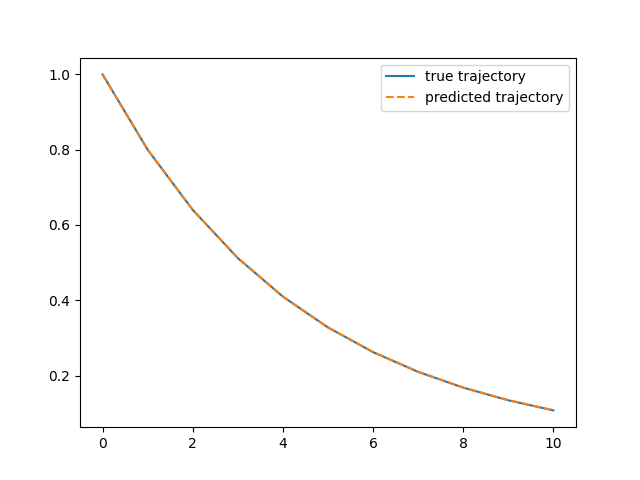
Comparison between ground truth and learned trajectory after training.
Full Code
# helper functions
def zero_1d_array(len: ℝ): ℝ[m]:
results: ℝ[len] = for i: ℕ(len) -> i*0
return results
def get_1d_array_length(x: ℝ[m]): ℝ:
total: ℝ = 0
temp: ℝ = 0
for i:
temp = x[i]
total += 1
return total
def append(x: ℝ[m], var: ℝ): ℝ[n]:
new_length: ℝ = get_1d_array_length(x) + 1
results: ℝ[new_length] = zero_1d_array(new_length)
for i:ℕ(new_length):
if i<get_1d_array_length(x):
results[i] = x[i]
else:
results[i] = var
return results
# training code
# dy/dt = -θy
# here, θ is a parameter to learn
def f(y: ℝ, θ: ℝ): ℝ:
return -θ * y
timesteps: ℕ = 10
dt: R = 0.1
def solver(θ: ℝ): ℝ[m]:
y: ℝ = 1.0
y_array: ℝ[1] = [1.0]
for i:ℕ(timesteps):
dy = f(y, θ)
y += dt * dy
y_array = append(y_array, y)
return y_array
true_theta: ℝ = 2.0
y_true: ℝ[m] = solver(true_theta)
def calculate_loss(θ: ℝ): ℝ:
y_predicted: ℝ[n] = solver(θ)
L: ℝ = 0.0
m: ℝ = get_1d_array_length(y_predicted)
for i:ℕ(m):
L += (y_predicted[i] - y_true[i]) ** 2
return L/m
θ: ℝ = 1.0
learning_rate: ℝ = 0.1
epochs: ℝ = 1000
for i:ℕ(epochs):
g = grad(calculate_loss, θ)
θ = θ - learning_rate * g
y_predicted: ℝ[m] = solver(θ)
plot_trajectories(y_true, y_predicted)